



14. Staubsauger- und Reinigungsroboter („staubsauger“)
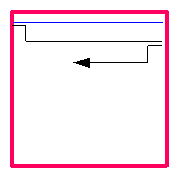 Ein Roboter mit einem Touchsensor soll eine rechteckige Fläche, die auf zwei Seiten durch Wände begrenzt ist, so abfahren, als ob er sie wie ein Rasenmäher mähen würde. Falls er mit dem Touchsensor die Begrenzung berührt, fährt er eine kurze Strecke zurück, dreht um 90° links oder rechts und fährt ein wenig vorwärts, dreht noch einmal rechts oder links und fährtanschliessend geradeaus weiter.
Ein Roboter mit einem Touchsensor soll eine rechteckige Fläche, die auf zwei Seiten durch Wände begrenzt ist, so abfahren, als ob er sie wie ein Rasenmäher mähen würde. Falls er mit dem Touchsensor die Begrenzung berührt, fährt er eine kurze Strecke zurück, dreht um 90° links oder rechts und fährt ein wenig vorwärts, dreht noch einmal rechts oder links und fährtanschliessend geradeaus weiter.
15. 15. Hell und dunkel „sehen“ („hell_dunkel“)
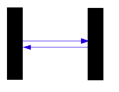
Der Roboter mit einem Lichtsensor bewegt sich zwischen den zwei dunklen Streifen. Wenn er schwarz „sieht“, dreht er um 180° und fährt wieder zurück.
16. 16. Streifen zählen („streifen_count“)
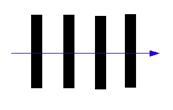
Ein Roboter mit einem Lichtsensor soll quer über einige dunkle Streifen fahren. Bei jedem nächsten Streifen erzeugt er ein akustisches Signal und erhöht den Streifen-Zähler um 1. Die Anzahl der Streifen soll fortlaufend auf dem Displayangezeigt werden.
17. Licht nachfahren („lichtstrahl“)
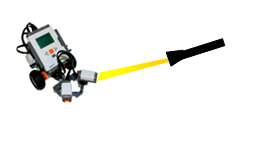
Roboter mit zwei Lichtsensoren soll einer Lichtquelle, z.B. einer Taschenlampe, nachfahren. Wird der linke Lichtsensor beleuchtet, fährt der Roboter links, wird der rechte Lichtsensor beleuchtet, so fährt er rechts, sonst geradeaus.
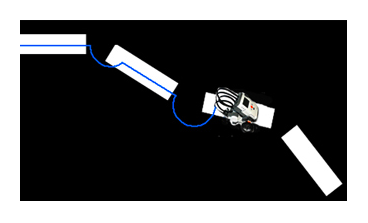
18. Ameisenpfad („luecke“)
Wenn eine Ameise einer Ameisenstrasse folgt und deren Spur verliert, macht sie eine kreisartige Bewegung in der Hoffnung, den Pfad wiederzufinden. Analog zu diesem Verhalten soll de Pathfinder mit Hilfe von Lichtsensoren einem weißen Pfad, der Lücken aufweist, folgen. Wenn der Roboter auf eine Lücke trifft, soll er einen kleinen Kreis fahren und dabei den verlorenen Pfad wiederfinden.
Download: Word-Format PDF-Format