



1. Geradeaus („geradeaus“)
2 Sekunden nach vor und dann ohne umzudrehen 1 Sekunde zurück.
![]()
2. Umdrehungen („umdreh“)
3 Umdrehungen nach und ohne umzudrehen 2 Umdrehungen zurück. 3. Exakt fahren („exakt“)
3. Exakt fahren („exakt“)
Der Roboter soll exakt 1m nach vor fahren. Es ist die Funktion VIEW zu verwenden.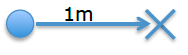 4. Vor und zuück („exakt_zurück“)
4. Vor und zuück („exakt_zurück“)
Der Roboter soll exakt 1 m nach vor fahren, umdrehen und dann in die Ausgangslage wieder zurückkehren. 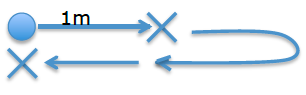
5. Stopp bei schwarzer Linie („schw_linie“)
Der Roboter soll zu einer schwarzen Linie nach vor fahren und dann dort stoppen.
6. Zur schwarzen Linie und wieder zurück („schw_linie_zurueck“)
Der Roboter soll bis zur schwarzen Linie vor fahren, dort stehen bleiben, umdrehen und wieder in die Ausgangslage zurückkehren.

Download: Word-Format PDF-Format